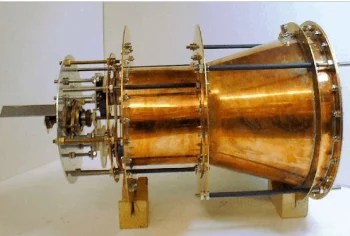
I have been following the NASA developments on the EM Drive with great interest, and so I was very interested to see that Paul March (a NASA Eagleworks engineer) today stated that he is measuring a force of over 100µN for 80W of electrical power.
I was curious to put this into context. A quick google reveals that you can purchase solar panels for spacecraft that produce 300W/kg.
Let’s say that you can scale up the solar panels such that the mass of the engine is negligible compared to the solar panel mass. (A big assumption)
Taking his Paul March’s figure of 100µN/80W at face value, 300W per kg solar panels would produce a force per kg of = 0.0004 Newtons/kg, so an acceleration of:

This sounds extremely small, but we can accelerate constantly over long periods of time.
After 1 year of this acceleration, we would have a delta-velocity, dV, of:

A delta-V of 12km/s isn’t shabby at all. Here’s a delta-V map of our solar system:

DeltaV map of our solar system
So from Low Earth orbit, a dV of 12km/s gets us to the moon in very low orbit, and coming back again!

(of course you can’t actually land and take off since the force is less than that of gravity at the surface, but you could do a very low fly-by).
So we could have a shuttle going to the moon and back every year. Not sure if that’s useful, but I’m sure someone could think of a use!
What else could we do with it?
From that delta-V map, we could get to a low orbit around Venus in about 6 months 
We could get to pretty much any planet in up to a year. (e.g. low orbit Neptune is 
Imagine what we could do with a spacecraft capable of visiting the furthest planets and returning in just over a couple years.
And that’s all without any sort of gravitational slingshots!
Effect of moving away from the Sun
A reader pointed out that the solar energy collected would of course decrease as you moved away from the Sun.
We can do a quick calculation – consider a round trip to Mars and back.
Distance from Sun to Mars: 1.38 au

So the power generated by the solar panels would be reduced by 50%. That means, roughly, on average you’d get 75% of the acceleration that I mentioned, and so would increase the round trip from lower earth orbit to lower Mars orbit from 0.95 years to 1.3 years.
(I’ve obviously linearised where I shouldn’t have, the effect being an underestimation of the time, but you can get a crude back-of-the-envelope feeling for this.)
Solar Panels or Nuclear Power?
Nasa’s “Safe Affordable Fission Engine” can generate 100kW with 500Kg mass. So 200W/kg. Less than the 300W/kg that the solar panels can produce near earth, and on par with the average for a trip to Mars. For a trip much further than the Mars then it starts to make sense.
Batteries?
Batteries store around 250Wh/kg. So 1kg can generate 250 watts for one hour… which is what a solar panel can do continuously.
Theoretical maximums
If it could be scaled to produce 1g acceleration, a human could explore this galaxy and even a neighbouring galaxy within their lifetime: http://math.ucr.edu/home/baez/physics/Relativity/SR/Rocket/rocket.html
The problem however is that at high velocities, space dust becomes more and more dangerous. At even high velocities, the very bumps in the spacetime from gravity waves becomes dangerous.
 , with a motor and flywheel attached to one end. The motor can spin up the flywheel. The other end is on a non-slip floor.
, with a motor and flywheel attached to one end. The motor can spin up the flywheel. The other end is on a non-slip floor.
 , and the total mass of motor
, and the total mass of motor  plus mass of flywheel,
plus mass of flywheel,  is
is  , the torque due to gravity,
, the torque due to gravity,  is:
is:
 and
and 
 , then the angular acceleration of the flywheel is:
, then the angular acceleration of the flywheel is:
 of:
of:

 and on the right
and on the right  , thus the units match and check our work)
, thus the units match and check our work) and the torque required to counter gravity is
and the torque required to counter gravity is  , so if the mass is dominated by the flywheel then
, so if the mass is dominated by the flywheel then  .
.
 . Differentiating gives
. Differentiating gives  which has a zero at
which has a zero at  .
. !
! to include the mass of the other flywheels. For minimum power usage, this would mean that we’d want to minimize
to include the mass of the other flywheels. For minimum power usage, this would mean that we’d want to minimize  which is minimum at $M_f = M_m/3$.
which is minimum at $M_f = M_m/3$. we want to maximize the radius of the flywheel.
we want to maximize the radius of the flywheel.



