LSTM Neural Networks are interesting. There’s plenty of literature on the web about them, so I thought I’d cut to the chase and show how to implement a toy game.
In this game, we want to have a mouse and a cat in a room. The cat tries to eat the mouse, and the mouse tries to avoid being eaten.
Cat & Mouse start randomly. Mouse is taught to run away from the stationary cat.
We will give the mouse and cat both an LSTM Neural Network brain, and let them fight it out.
This game will be implemented with a straight forward LSTM neural network. This means that it is supervised which means that our mouse and cat brains can only learn by example.
This is really important – it means that we can’t just have our mouse and cat learn for themselves. We could do that if we used genetic algorithms to develop the neural networks, but that’s not how we’re doing it here.
With all that said, let’s just dive straight in!
First, lets set up a sigmoid function and its derivative:

#!/usr/bin/python
import copy, numpy as np
import math
np.random.seed(0)
# compute sigmoid nonlinearity
def sigmoid(x):
output = 1/(1+np.exp(-x))
return output
# convert output of sigmoid function to its derivative
def sigmoid_output_to_derivative(output):
return output*(1-output)
class LSTM_Brain:
def __init__(self):
self.alpha = 0.1 # Training rate
self.input_dim = 4 # Number of parameters for the input. We input the position of the cat and the mouse.
self.hidden_dim = 16 # Size of a brain, so to speak. Feel free to vary
self.output_dim = 1 # Number of outputs. We output just the preferred direction, so just one.
self.brain_wipe()
def setupTraining(self):
self.input_values = list()
self.layer_2_deltas = list()
self.layer_1_values = list()
self.layer_1_values.append(np.zeros(self.hidden_dim))
self.total_abs_error = 0 # Store the error and smoothed error just for debugging information
def feedInputForGetOutput(self, inputData):
# inputData has only been tested for values between 0 and 1. Not sure how it works otherwise
assert len(inputData) == self.input_dim
X = np.array([inputData])
self.input_values.append(X)
# Feed the input to our 'brain', and return the output (e.g. which direction it thinks we should move in)
# hidden layer (input ~+ prev_hidden)
layer_1 = sigmoid(np.dot(X,self.synapse_0) + np.dot(self.layer_1_values[-1],self.synapse_h))
# output layer (new action)
self.layer_2 = sigmoid(np.dot(layer_1,self.synapse_1))
# store hidden layer so we can use it in the next timestep
self.layer_1_values.append(copy.deepcopy(layer_1))
return self.layer_2[0]
def teachError(self, error):
self.total_abs_error += sum(np.abs(error)) # We store this just for debugging
self.layer_2_error = np.array([error]).T
self.layer_2_deltas.append((self.layer_2_error)*sigmoid_output_to_derivative(self.layer_2))
def brain_wipe(self):
# initialize neural network weights. Forget everything we've learned
self.synapse_0 = 2*np.random.random((self.input_dim,self.hidden_dim)) - 1
self.synapse_1 = 2*np.random.random((self.hidden_dim,self.output_dim)) - 1
self.synapse_h = 2*np.random.random((self.hidden_dim,self.hidden_dim)) - 1
self.total_smoothed_abs_error = None
def learnFromGame(self):
future_layer_1_delta = np.zeros(self.hidden_dim)
synapse_0_update = np.zeros_like(self.synapse_0)
synapse_1_update = np.zeros_like(self.synapse_1)
synapse_h_update = np.zeros_like(self.synapse_h)
# Now, learn from the game
for time_tick in range(len(self.input_values)):
X = self.input_values[-time_tick-1]
layer_1 = self.layer_1_values[-time_tick-1]
prev_layer_1 = self.layer_1_values[-time_tick-2]
# error at output layer
layer_2_delta = self.layer_2_deltas[-time_tick-1]
# error at hidden layer
layer_1_delta = (future_layer_1_delta.dot(self.synapse_h.T) + layer_2_delta.dot(self.synapse_1.T)) * sigmoid_output_to_derivative(layer_1)
# let's update all our weights so we can try again
synapse_1_update += np.atleast_2d(layer_1).T.dot(layer_2_delta)
synapse_h_update += np.atleast_2d(prev_layer_1).T.dot(layer_1_delta)
synapse_0_update += X.T.dot(layer_1_delta)
future_layer_1_delta = layer_1_delta
self.synapse_0 += synapse_0_update * self.alpha
self.synapse_1 += synapse_1_update * self.alpha
self.synapse_h += synapse_h_update * self.alpha
if self.total_smoothed_abs_error is None:
self.total_smoothed_abs_error = self.total_abs_error
else:
self.total_smoothed_abs_error = self.total_smoothed_abs_error * 0.999 + 0.001* self.total_abs_error # Smooth it - for debugging only
At this point, we’ve got a basic LSTM.
Let’s now give it a world and put this brain in a mouse, and the mouse in a world.
class World:
# For directions, 0,0 is in the bottom left. Up is positive y. Direction is between 0 and 1
Up = 0.125
Right = 0.375
Down = 0.625
Left = 0.875
def __init__(self):
self.map_width = 6
self.map_height = 6
def resetWorld(self, cat_x, cat_y, mouse_x, mouse_y):
self.cat_x = cat_x
self.cat_y = cat_y
self.mouse_x = mouse_x
self.mouse_y = mouse_y
def distance_from_cat_x(self):
return self.mouse_x - self.cat_x
def distance_from_cat_y(self):
return self.mouse_y - self.cat_y
def moveMouse(self, time_tick, mouse_movement):
if mouse_movement < (self.Up + 0.125): # 0 to 0.25 is up. midpoint is 0.125
self.mouse_y += 1
elif mouse_movement < (self.Right + 0.125): # 0.25 to 0.5 is right. midpoint is 0.375
self.mouse_x += 1
elif mouse_movement < (self.Down + 0.125): # 0.5 to 0.75 is down. midpoint is 0.625
self.mouse_y -= 1
else:
self.mouse_x -= 1 # 0.75 to 1 is left. midpoint is 0.875
self.mouse_x = np.clip(self.mouse_x, 0, self.map_width-1)
self.mouse_y = np.clip(self.mouse_y, 0, self.map_height-1)
class GameWithStupidComputerTeacher:
def __init__(self):
self.debug = False # Whether to print out debug information
self.game_length = 10 # Number of moves a game should last for. We make this fixed, but we could make it variable
self.world = World() # The world to run in
def runGame(self, mouse_brain):
# Start a new game. We have a cat and a mouse
# at their starting position
self.world.resetWorld(np.random.randint(0,self.world.map_width),np.random.randint(0,self.world.map_height),
np.random.randint(0,self.world.map_width),np.random.randint(0,self.world.map_height))
mouse_brain.setupTraining()
for time_tick in range(self.game_length):
mouse_movement = mouse_brain.feedInputForGetOutput([(self.world.cat_x)/float(self.world.map_width-1),
(self.world.cat_y)/float(self.world.map_width-1),
(self.world.mouse_x)/float(self.world.map_height-1),
(self.world.mouse_y)/float(self.world.map_height-1)])[0]
ideal_direction = self.stupidTeacherForMouseGetIdealDirection()
mouse_brain.teachError([ideal_direction - mouse_movement])
# This is the direction the mouse brain says it wants to move in. We treat it as a clockwise compass reading
# Move the mouse accordingly
#self.world.moveMouse(time_tick, ideal_direction)
self.world.moveMouse(time_tick, mouse_movement)
# Game is completed. Learn from what we've been taught.
mouse_brain.learnFromGame()
def stupidTeacherForMouseGetIdealDirection(self):
# Play the role of a stupid teacher for the mouse, and direct the mouse to just run in the opposite direction from the cat
ideal_direction = 0
if self.world.distance_from_cat_x() >= 0:
# We could move right. But check if moving up or down makes more sense
if self.world.distance_from_cat_y() > self.world.distance_from_cat_x() and self.world.mouse_y != self.world.map_height - 1:
ideal_direction = self.world.Up
elif -self.world.distance_from_cat_y() > self.world.distance_from_cat_x() and self.world.mouse_y != 0:
ideal_direction = self.world.Down
elif self.world.distance_from_cat_y() > 0 and self.world.mouse_x == self.world.map_width - 1:
ideal_direction = self.world.Up
elif self.world.distance_from_cat_y() < 0 and self.world.mouse_x == self.world.map_width - 1:
ideal_direction = self.world.Down
else:
ideal_direction = self.world.Right
else:
if self.world.distance_from_cat_y() > -self.world.distance_from_cat_x() and self.world.mouse_y != self.world.map_height - 1:
ideal_direction = self.world.Up # up is the best way!
elif -self.world.distance_from_cat_y() > -self.world.distance_from_cat_x() and self.world.mouse_y != 0:
ideal_direction = self.world.Down # down is the best way!
elif self.world.distance_from_cat_y() >= 0 and self.world.mouse_x == 0:
ideal_direction = self.world.Up # can't go left, so go up!
elif self.world.distance_from_cat_y() < 0 and self.world.mouse_x == 0:
ideal_direction = self.world.Down # can't go left, so go down!
else:
ideal_direction = self.world.Left # left is the best way!
if self.debug:
print "cat:", self.world.cat_x, self.world.cat_y, "mouse:", self.world.mouse_x, self.world.mouse_y, "distance:", self.world.distance_from_cat_x(), self.world.distance_from_cat_y(), "ideal: ", ideal_direction
return ideal_direction
game = GameWithStupidComputerTeacher()
mouse_brain = LSTM_Brain()
print_csv = True
print_progress = not print_csv and True
if not print_csv:
graphics.init(game.world.map_width, game.world.map_height)
finish = False
for j in range(10000001):
game.debug = (j == 10000000) and not print_csv
game.runGame(mouse_brain)
if mouse_brain.total_smoothed_abs_error*4 < 1.2:
finish = True # An average of making 1 error per game
# print out progress
if (print_progress and j % 1000 == 0) or finish:
mouse_x = [int(x[0][2]*(game.world.map_width-1)) for x in mouse_brain.input_values]
mouse_y = [int(y[0][3]*(game.world.map_height-1)) for y in mouse_brain.input_values]
cat_x = [game.world.cat_x] * len(mouse_brain.input_values)
cat_y = [game.world.cat_y] * len(mouse_brain.input_values)
print "Game: ", j
print "cat x: ", cat_x
print "cat y: ", cat_y
print "mouse x:", mouse_x, " Errors:", '%.1f'%(mouse_brain.total_abs_error*4), "Smoothed Errors:", '%.1f'%(mouse_brain.total_smoothed_abs_error*4)
print "mouse y:", mouse_y
print
graphics.updateGraphics(cat_x, cat_y, mouse_x, mouse_y)
if print_csv and j % 1000 == 0:
print j, ",", mouse_brain.total_smoothed_abs_error*4
if finish:
break
At the end of this, we have a mouse that learns to run away from a stationary cat.
The teacher is teaching the mouse to:
1. Move away from the cat, in the direction that you are already furthest in.
2. Unless there you come to a wall. In which case move along the wall, away from the cat.
For a toy example, this is relatively challenging since the mouse neural net is being fed the absolute position of the mouse and the cat,
and so needs to learn to take the difference between the positions, judge which is largest, and modify the behaviour if near a wall.
It takes approximately 1 million games, with each game being 10 moves, for the mouse to learn to follow the teachers’ instruction with only 1.4 mistakes per game (averaged over 1000 games). Reducing this to 1 mistake per game took a further 2 million games and took 40 minutes CPU time on my laptop.
Here is an example game: (The GUI was done in pygame btw)
Cat & Mouse start randomly. Mouse is taught to run away from the stationary cat.
And here’s an example mistake that it made even after 2 million training games:

Example mistake, after 2 million training games. The mouse takes a step towards the cat.
I played about with different training rate values (alpha in the code) but the learning rate didn’t seem dependent upon it.
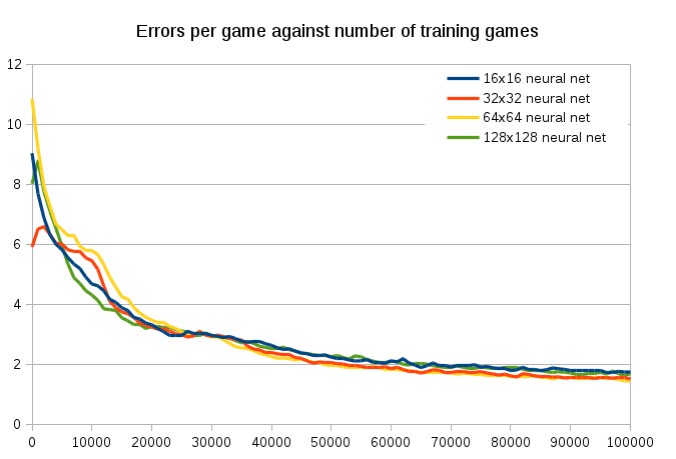
I tested increasing the hidden net from 16 to 32, and that made a pretty big difference. To reach an accuracy of 1.2 mistakes per game took:
- 16×16 hidden layer took 8m40s and 716342 games
- 32×32 hidden layer took 3m29s and 239721 games
- 64×64 hidden layer took 3m13s and 216513 games
- 128×128 hidden layer took 5m45s and 279732 games
Interestingly, if you compare the first 100,000 games the neural net size makes hardly no difference at all. They all get down to an error of about 2 at about the same rate. It’s also cool to see that the large 64×64 neural net takes about 30,000 training games to catch up with the small neural networks, since it has a much larger matrix to tame. Yet the 128×128 is much quicker to train. I don’t know why.
I also wrote a small program to display the synapses_0 matrix, which converts the input to the hidden matrix size, and plotted its against time. I also attempt to show how it is mapping the four inputs to the output by showing our four colours would be transformed by the matrix. While it is pretty to watch, it’s hard to see anything useful from it.

The synapses_0 matrix values, plotted in grayscale, and how it combines with the inputs. Each frame is 10,000 training games.
The initial and final state:


Graphics
For the sake of completeness, this is the graphics.py
import pygame
MAP_WIDTH = 10
MAP_HEIGHT = 10
# This sets the margin between each cell
MARGIN = 5
WINDOW_SIZE = [255, 255]
def lightened(color, amount):
h, s, l, a = color.hsla
if l+amount &gt; 100: l = 100
elif l+amount &lt; 0: l = 0
else: l += amount
color.hsla = (h, s, l, a)
return color
def init(map_width, map_height):
global WINDOW_SIZE, MAP_WIDTH, MAP_HEIGHT, screen, clock, cat_image, mouse_image, grid_width, grid_height
MAP_WIDTH = map_width
MAP_HEIGHT = map_height
grid_width = (WINDOW_SIZE[0] - MARGIN) / MAP_WIDTH - MARGIN
grid_height = (WINDOW_SIZE[1] - MARGIN) / MAP_HEIGHT - MARGIN
# Round the window size, so that we don't have fractions
WINDOW_SIZE = ((grid_width + MARGIN) * MAP_WIDTH + MARGIN, (grid_height + MARGIN) * MAP_HEIGHT + MARGIN)
# Initialize pygame
pygame.init()
# Set the HEIGHT and WIDTH of the screen
screen = pygame.display.set_mode(WINDOW_SIZE)
# Set title of screen
pygame.display.set_caption(&quot;LSTM Neural Net Cat and Mouse&quot;)
# Used to manage how fast the screen updates
clock = pygame.time.Clock()
cat_image = pygame.image.load(&quot;cat.png&quot;)
mouse_image = pygame.image.load(&quot;mouse.png&quot;)
mouse_image = pygame.transform.smoothscale(mouse_image, (grid_width, grid_height))
cat_image = pygame.transform.smoothscale(cat_image, (grid_width, grid_height))
def updateGraphics(cat_x, cat_y, mouse_x, mouse_y):
for event in pygame.event.get(): # User did something
if event.type == pygame.QUIT: # If user clicked close
done = True # Flag that we are done so we exit this loop
pygame.quit()
return False
# Set the screen background
screen.fill(pygame.Color(&quot;black&quot;))
# Draw the grid
for row in range(MAP_HEIGHT):
for column in range(MAP_WIDTH):
pygame.draw.rect(screen,
pygame.Color(&quot;white&quot;),
[(MARGIN + grid_width) * column + MARGIN,
(MARGIN + grid_height) * row + MARGIN,
grid_width,
grid_height])
for i in range(len(mouse_x)):
color = pygame.Color(&quot;green&quot;)
color = lightened(color, -30*i/len(mouse_x))
pygame.draw.rect(screen,
color,
[(MARGIN + grid_width) * mouse_x[i] + MARGIN*2,
(MARGIN + grid_height) * (MAP_HEIGHT - mouse_y[i] - 1) + MARGIN*2,
grid_width - MARGIN*2,
grid_height - MARGIN*2])
if i != len(mouse_x) - 1:
pygame.draw.lines(screen,
color,
False,
[((MARGIN + grid_width) * mouse_x[i] + (MARGIN + grid_width)/2,
(MARGIN + grid_height) * (MAP_HEIGHT - mouse_y[i] - 1) + (MARGIN + grid_height)/2),
((MARGIN + grid_width) * mouse_x[i+1] + (MARGIN + grid_width)/2,
(MARGIN + grid_height) * (MAP_HEIGHT - mouse_y[i+1] - 1) + (MARGIN + grid_height)/2)],
10)
for i in range(len(cat_x)):
color = pygame.Color(&quot;red&quot;)
color = lightened(color, -30*i/len(cat_x))
pygame.draw.rect(screen,
color,
[(MARGIN + grid_width) * cat_x[i] + MARGIN*2,
(MARGIN + grid_height) * (MAP_HEIGHT - cat_y[i] - 1) + MARGIN*2,
grid_width - MARGIN*2,
grid_height - MARGIN*2])
if i != len(cat_x) - 1:
pygame.draw.lines(screen,
color,
False,
[((MARGIN + grid_width) * cat_x[i] + (MARGIN + grid_width)/2,
(MARGIN + grid_height) * (MAP_HEIGHT - cat_y[i] - 1) + (MARGIN + grid_height)/2),
((MARGIN + grid_width) * cat_x[i+1] + (MARGIN + grid_width)/2,
(MARGIN + grid_height) * (MAP_HEIGHT - cat_y[i+1] - 1) + (MARGIN + grid_height)/2)],
10)
screen.blit(mouse_image, ((MARGIN + grid_width) * mouse_x[-1] + MARGIN,
(MARGIN + grid_height) * (MAP_HEIGHT - mouse_y[i-1] - 1) + MARGIN))
screen.blit(cat_image, ((MARGIN + grid_width) * cat_x[-1] + MARGIN,
(MARGIN + grid_height) * (MAP_HEIGHT - cat_y[i-1] - 1) + MARGIN))
# Go ahead and update the screen with what we've drawn.
pygame.display.flip()
# Limit to 60 frames per second
clock.tick(60)
return True

Pingback: Learning Machine Learning | John Tapsell