For a client I needed a way to draw a gradient in realtime generated from four points, on a mobile phone. To produce an image like this, where the four gradient points can be moved in realtime:

I wanted to implement this using a shader, but after googling for a while I couldn’t find an existing implementation.
The problem is that I have the desired colours at four points, and need to calculate the colour at any other arbitrary point.
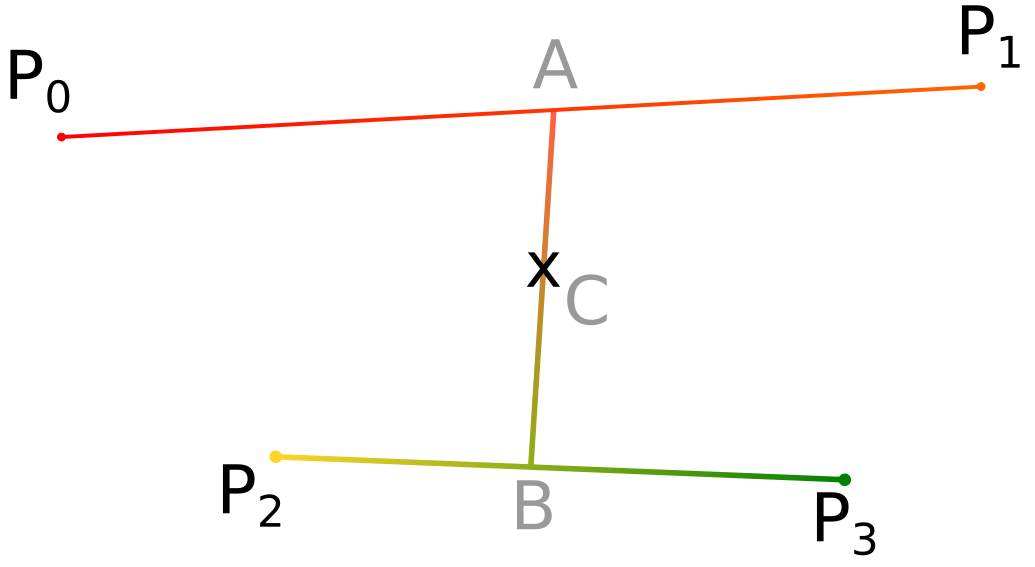
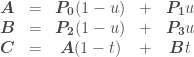
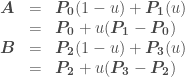
So we have three simultaneous equations (vectors in bold):

The key to solving this is to reduce the number of freedoms by setting  .
.
Solving for  gives us:
gives us:

And solving for  and
and  :
:
so:

Defining:

Lets us now rewrite as:

Which written out for x and y is:

Now we have to consider the various different cases. If  then we have:
then we have:

Likewise if  then we have:
then we have:

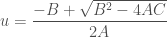
Otherwise we are safe to divide by  and so:
and so:

Which can be solved with the quadratic formula when A is not zero: (Note that only the positive solution makes physical sense for us, and we can assume  )
)
and when A is zero (or, for computational rounding purposes, close to zero):

Math Summary
We can determine  and
and  with:
with:

Implementation as a shader:
This can be implemented as a shader as following: (The following can be run directly on https://www.shadertoy.com for example)
void mainImage( out vec4 fragColor, in vec2 fragCoord )
{
//Example colors. In practise these would be passed in
// as parameters
vec4 color0 = vec4(0.918, 0.824, 0.573, 1.0); // EAD292
vec4 color1 = vec4(0.494, 0.694, 0.659, 1.0); // 7EB1A8
vec4 color2 = vec4(0.992, 0.671, 0.537, 1.0); // FDAB89
vec4 color3 = vec4(0.859, 0.047, 0.212, 1.0); // DB0C36
vec2 uv = fragCoord.xy / iResolution.xy;
//Example coordinates. In practise these would be passed in
// as parameters
vec2 P0 = vec2(0.31,0.3);
vec2 P1 = vec2(0.7,0.32);
vec2 P2 = vec2(0.28,0.71);
vec2 P3 = vec2(0.72,0.75);
vec2 Q = P0 - P2;
vec2 R = P1 - P0;
vec2 S = R + P2 - P3;
vec2 T = P0 - uv;
float u;
float t;
if(Q.x == 0.0 && S.x == 0.0) {
u = -T.x/R.x;
t = (T.y + u*R.y) / (Q.y + u*S.y);
} else if(Q.y == 0.0 && S.y == 0.0) {
u = -T.y/R.y;
t = (T.x + u*R.x) / (Q.x + u*S.x);
} else {
float A = S.x * R.y - R.x * S.y;
float B = S.x * T.y - T.x * S.y + Q.x*R.y - R.x*Q.y;
float C = Q.x * T.y - T.x * Q.y;
// Solve Au^2 + Bu + C = 0
if(abs(A) < 0.0001)
u = -C/B;
else
u = (-B+sqrt(B*B-4.0*A*C))/(2.0*A);
t = (T.y + u*R.y) / (Q.y + u*S.y);
}
u = clamp(u,0.0,1.0);
t = clamp(t,0.0,1.0);
// These two lines smooth out t and u to avoid visual 'lines' at the boundaries. They can be removed to improve performance at the cost of graphics quality.
t = smoothstep(0.0, 1.0, t);
u = smoothstep(0.0, 1.0, u);
vec4 colorA = mix(color0,color1,u);
vec4 colorB = mix(color2,color3,u);
fragColor = mix(colorA, colorB, t);
}
And the same code again, but formatted as a more typical shader and with parameters:
uniform lowp vec4 color0;
uniform lowp vec4 color1;
uniform lowp vec4 color2;
uniform lowp vec4 color3;
uniform lowp vec2 p0;
uniform lowp vec2 p1;
uniform lowp vec2 p2;
uniform lowp vec2 p3;
varying lowp vec2 coord;
void main() {
lowp vec2 Q = p0 - p2;
lowp vec2 R = p1 - p0;
lowp vec2 S = R + p2 - p3;
lowp vec2 T = p0 - coord;
lowp float u;
lowp float t;
if(Q.x == 0.0 &amp;&amp; S.x == 0.0) {
u = -T.x/R.x;
t = (T.y + u*R.y) / (Q.y + u*S.y);
} else if(Q.y == 0.0 &amp;&amp; S.y == 0.0) {
u = -T.y/R.y;
t = (T.x + u*R.x) / (Q.x + u*S.x);
} else {
float A = S.x * R.y - R.x * S.y;
float B = S.x * T.y - T.x * S.y + Q.x*R.y - R.x*Q.y;
float C = Q.x * T.y - T.x * Q.y;
// Solve Au^2 + Bu + C = 0
if(abs(A) < 0.0001)
u = -C/B;
else
u = (-B+sqrt(B*B-4.0*A*C))/(2.0*A);
t = (T.y + u*R.y) / (Q.y + u*S.y);
}
u = clamp(u,0.0,1.0);
t = clamp(t,0.0,1.0);
// These two lines smooth out t and u to avoid visual 'lines' at the boundaries. They can be removed to improve performance at the cost of graphics quality.
t = smoothstep(0.0, 1.0, t);
u = smoothstep(0.0, 1.0, u);
lowp vec4 colorA = mix(color0,color1,u);
lowp vec4 colorB = mix(color2,color3,u);
gl_FragColor = mix(colorA, colorB, t);
}
Result
On the left is the result using smoothstep to smooth t and u, and on the right is the result without it. Although the non-linear smoothstep is computationally-expensive and a hack, I wasn’t happy with the visual lines that resulted in not using it.















 is a
is a 








 to
to  , and
, and  giving:
giving:


 “, but really it should be “Next two frequencies to add: … where
“, but really it should be “Next two frequencies to add: … where  ” since we are adding two frequencies at a time, in such a way that their imaginary parts cancel out, allowing us to keep everything real in the plots. I fixed this comment in the code, but didn’t want to rerender all the videos.
” since we are adding two frequencies at a time, in such a way that their imaginary parts cancel out, allowing us to keep everything real in the plots. I fixed this comment in the code, but didn’t want to rerender all the videos.
 . (A function that is 0 everywhere, except a sharp peak at exactly time = 0). In the S domain, this is a constant, meaning that we never converge. But visually it’s still cool.
. (A function that is 0 everywhere, except a sharp peak at exactly time = 0). In the S domain, this is a constant, meaning that we never converge. But visually it’s still cool.



 – that’s our original foreground+background image. And we know
– that’s our original foreground+background image. And we know  – that’s our background image. We want to now create a new foreground image,
– that’s our background image. We want to now create a new foreground image,  , with the maximum value of
, with the maximum value of  .
. so that I can have the maximum possible alpha without changing the final visual image at all. I.e. remove as much of the background as possible from our foreground+background image.
so that I can have the maximum possible alpha without changing the final visual image at all. I.e. remove as much of the background as possible from our foreground+background image. since each rgb pixel value is between 0 and 1. So:
since each rgb pixel value is between 0 and 1. So:



 if the image is that of a cat.
if the image is that of a cat. , in the network so that it slightly decreases the error (
, in the network so that it slightly decreases the error ( ). And then repeat.
). And then repeat.

 (or if it equals 0, we need to consider the third differential etc).
(or if it equals 0, we need to consider the third differential etc). , we’ll use
, we’ll use  to be the half squared error of
to be the half squared error of  .
.


 and
and  are learning rate hyperparameters.
are learning rate hyperparameters. i.e. That it tends to 1 as x approaches positive infinity
i.e. That it tends to 1 as x approaches positive infinity i.e. That it tends to 0 as x approaches negative infinity
i.e. That it tends to 0 as x approaches negative infinity
 and
and 
 .
.
 and
and 





 then
then  . I was too lazy to update the graphs sorry)
. I was too lazy to update the graphs sorry) :
:


